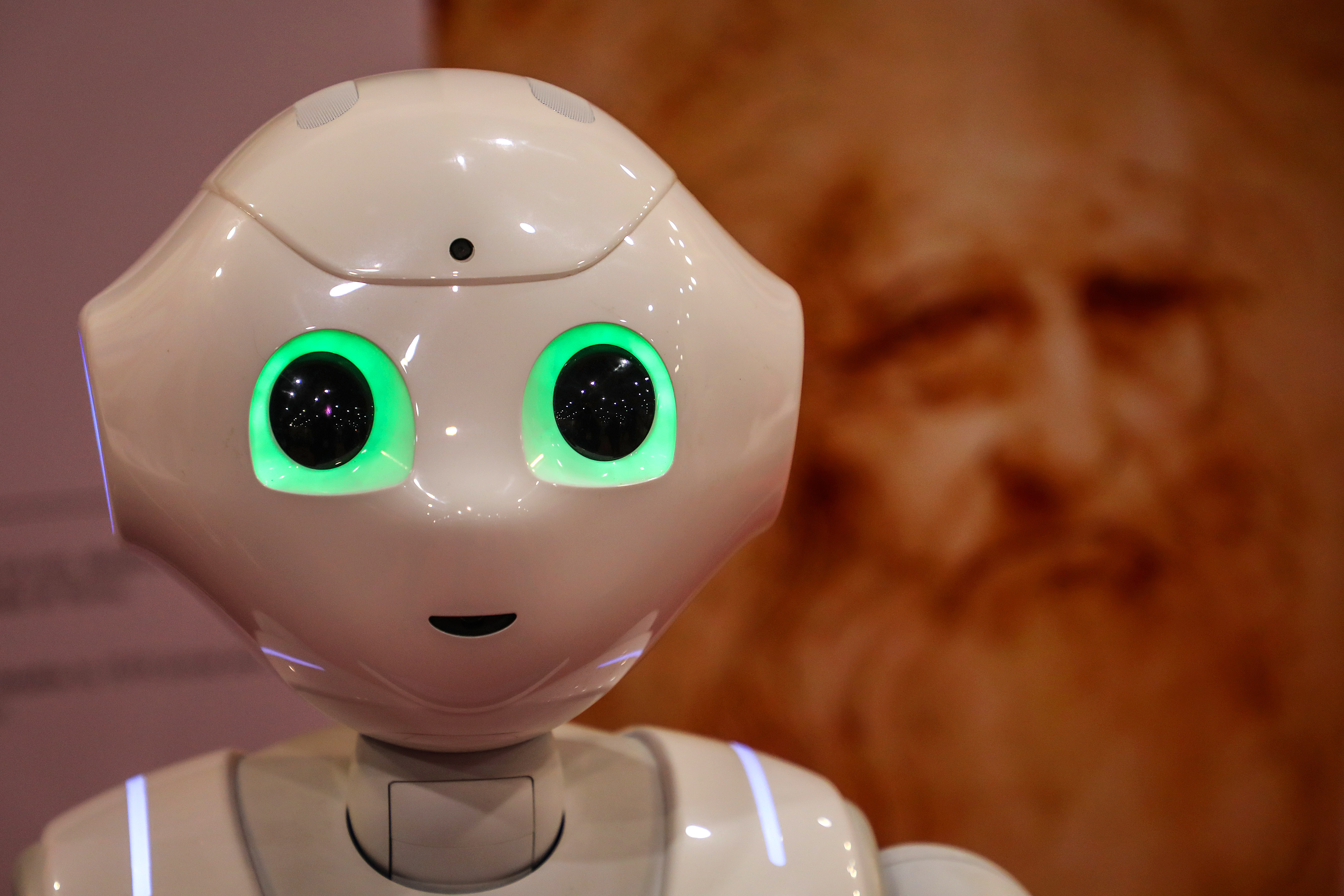
Pepper uno dei nostri robot umanoidi che utlizziamo per sviluppare modelli di robotica sociale.
Il laboratorio di Robotica Cognitiva e Social Sensing ha sede a Palermo e si occupa di rendere più semplici e naturali le interazioni tra l’uomo e le macchine ed in particolare i robot umanoidi e di interpretare i comportamenti sociali della popolazione analizzando l’enorme quantità di dati disponibile sulla rete Internet.
Attualmente al laboratorio afferiscono sei ricercatori strutturati e altre unità di personale con diverse forme di contratto. Alle attività del laboratorio partecipano anche professori universitari e ricercatori di altre istituzioni.
La robotica cognitiva ricerca nuove architetture e metodologie per migliorare il ciclo “percezione-comprensione-azione” dei sistemi autonomi artificiali, traendo ispirazione anche da modelli cognitivi umani.
E’ in questo contesto, che il laboratorio di occupa di studiare nuove metodologie per dotare i robot commerciali di un sistema per la percezione delle sensazioni. Questi studi servono quindi a definire il livello somatosensoriale.
L’obiettivo delle ricerche è anche quello di integrare aspetti cognitivi di base (comprensione del significato, apprendimento, processi decisionali, e comunicazione), con aspetti di più alto livello, quali l’analisi delle emozioni, la creatività, l’intelligenza “sociale” e le capacità introspettive e motivazioni che fortemente influenzano le azioni in ambienti reali.
La robotica cognitiva vuole rendere quanto più semplice possibile, intuitiva e naturale l’interazione sociale della macchina o del robot con gli esseri umani, spesso bambini, particolarmente attratti dalla fisicità dei robot umanoidi.
Gli aspetti legati alla comprensione sono affrontati studiando nuove architetture di apprendimento basate sui principali paradigmi del cognitive computing (reti neurali, spazi concettuali, spazi semantici, ontologie etc.).
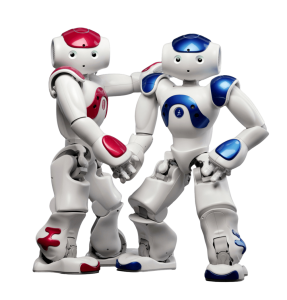
I 2 Nao che utilizziamo per sviluppare algoritmi di robotica creativa.
Grazie ad innovativi algoritmi per l’elaborazione del linguaggio naturale e all’analisi testuale, si riesce a interpretare il contenuto emotivo del corpus del testo e a classificare le frasi secondo alcune categorie di base. Questo consente di stabilire il “social sensing”, ovvero il sentimento dell’autore rispetto all’argomento.
Gli algoritmi di creatività artificiale consentono di ottenere un comportamento dei robot che non è sempre scontato e deterministico. Questo aiuta a strutturare comportamenti ancora più naturali e simili a quelli umani.
Il social sensing è complementare alla ricerca sulla robotica cognitiva. La grande quantità di dati disponibile sulla rete internet relativa alle abitudini sociali delle persone, se opportunamente interpretata, può costituire una preziosa base di informazioni utili ad una maggiore conoscenza in diversi campi di applicazione.
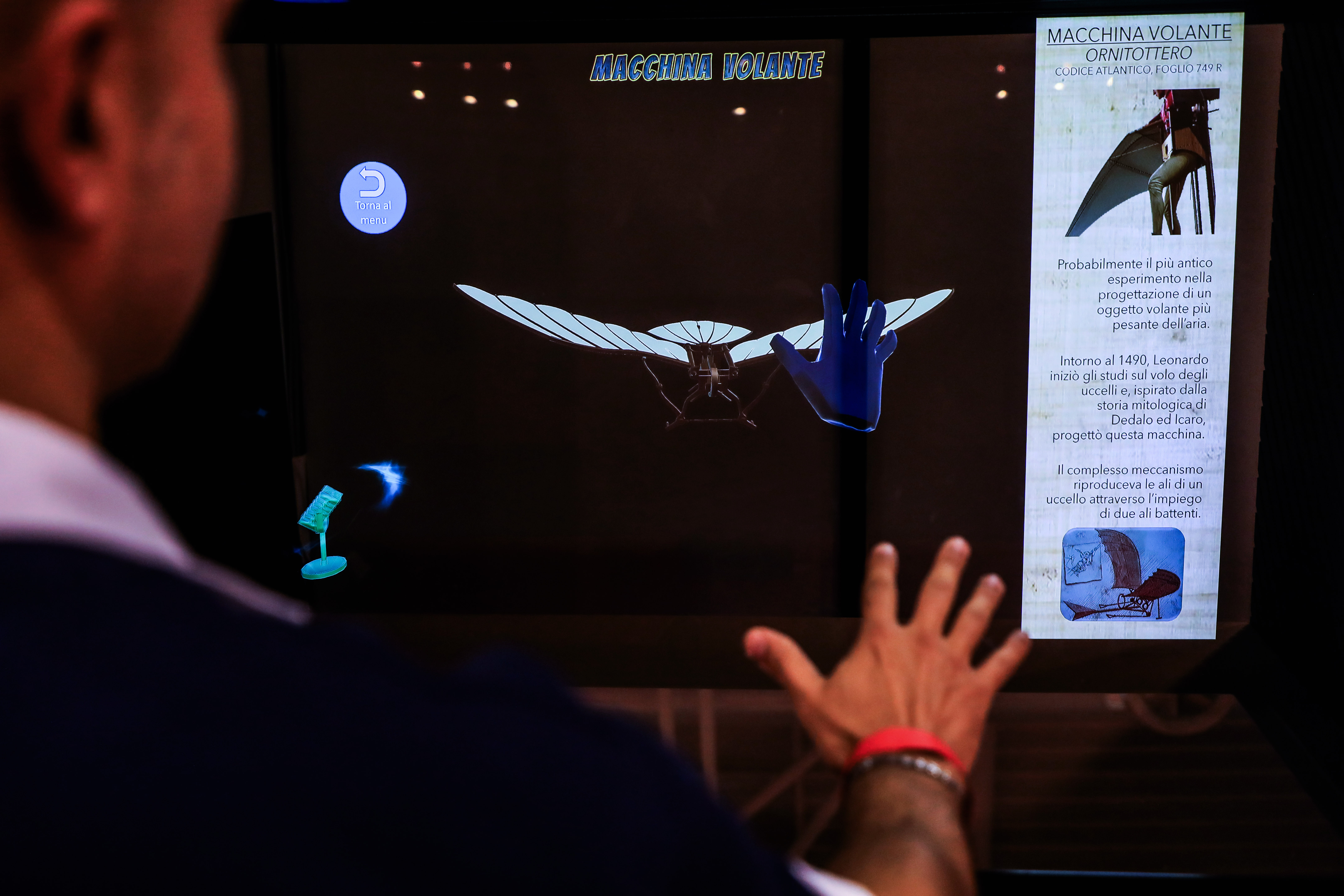
I principali campi di applicazione delle ricerche condotte dal laboratorio riguardano progetti di robotica sociale. Ad esempio nel campo dell’education, in cui il robot, durante un processo di interazione con i bambini, produce contenuti didattici o direttamente appresi dai discenti o reinterpretati e spiegati dal docente. Oppure nel campo dell’assistenza agli anziani e i disabili o ancora per la realizzazione di un “maggiordomo” in grado di accogliere gli ospiti in un ambiente domestico o lavorativo e soddisfare i loro bisogni informativi ed eventualmente condurli nei luoghi che desiderano. Tutto ciò è possibile grazie a sofisticati algoritmi di navigazione autonoma.